


释放双眼,带上耳机,听听看~!
本教程由@Xuxu 大佬投稿分享,BiliBili账号为:可爱的XUXU,欢迎围观大佬。
1 前言
在现代流体力学数值模拟领域,尤其是针对复杂旋转机械的计算流体动力学(CFD)研究中,监控点的布置是关键环节之一。流场中的监控点用于实时跟踪和分析流场中的关键物理量,如压力、速度和温度等,这些数据对于理解流动特性、优化设计以及预测设备性能至关重要。然而,传统的Fluent GUI环境在处理大量监控点时存在诸多局限性。一方面,手动输入大量监控点不仅工作量巨大,而且图形界面容易出现卡顿现象,这极大地降低了工作效率;另一方面,手动输入还容易导致错误,进而影响模拟结果的准确性。此外,对于旋转机械的数值计算,通常需要在每个流道的不同位置设置监控点,而低版本的Fluent缺少监控点的旋转复制功能,这使得流道监控点的布置变得尤为繁琐和耗时。
为了克服这些挑战,我们基于SpaceClaim的脚本功能开发了流场监控点设置功能。SpaceClaim以其强大的三维建模功能而闻名,能够高效地处理复杂的几何结构。利用SpaceClaim的镜像、旋转复制等功能,我们能够快速且准确地布置大量的监控点。这有效简化了监控点布置的流程,还显著提高了工作效率,减少了人为错误的发生,使得研究人员和工程师能够更加专注于核心的流体力学问题分析,而无需在繁琐的监控点布置上耗费过多精力。
本文档旨在详细阐述该脚本的使用方法、功能特点以及操作步骤,以帮助用户快速掌握如何利用该工具高效地布置监控点,从而提升其在流体力学数值模拟中的工作效率和准确性。
2 使用说明
脚本的使用主要有3个步骤,分别是监控点的创建与组合、Fluent监控点的创建/保存和Fluent监控点创建。本脚本仅适用于3D坐标,对于2D坐标并未在功能上进行开发。对于同时存在移动监控点和固定监控点的情况,建议先在Fluent设置好固定监控点,最后再设置移动监控点。
2.1 监控点的创建与组合
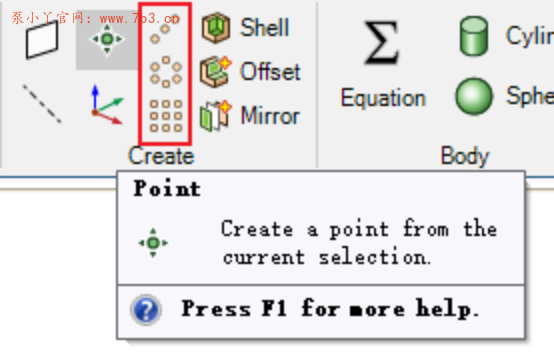
脚本主要通过SpaceClaim中DatumPoints获取点的三维坐标,如图1所示。SpaceClaim具有多种阵列复制方法,可根据需求快速创建大量点,在旋转机械数值计算中,这个功能可大大简化监控点的创建工作。若使用镜像功能,软件将镜像复制的点放于Pattern的阵列中,如图2所示。脚本要求,需要对阵列进行“取消阵列”操作。
此时,点将释放在结构树的根结构上,如图3所示,需要对相应的点人为进行编组和命名,编组命令为“移到新组件”(Move to New Component),组的命令可直接用于后续Fluent的命名中,因此需要遵循Fluent监控点命名规则(只能使用英文字符,不能包含下划线_和空格)。脚本中内置连接符,因此这里命名只需要填写前缀。同时,点的组件只能在结构树的根路径上,如图5所示。
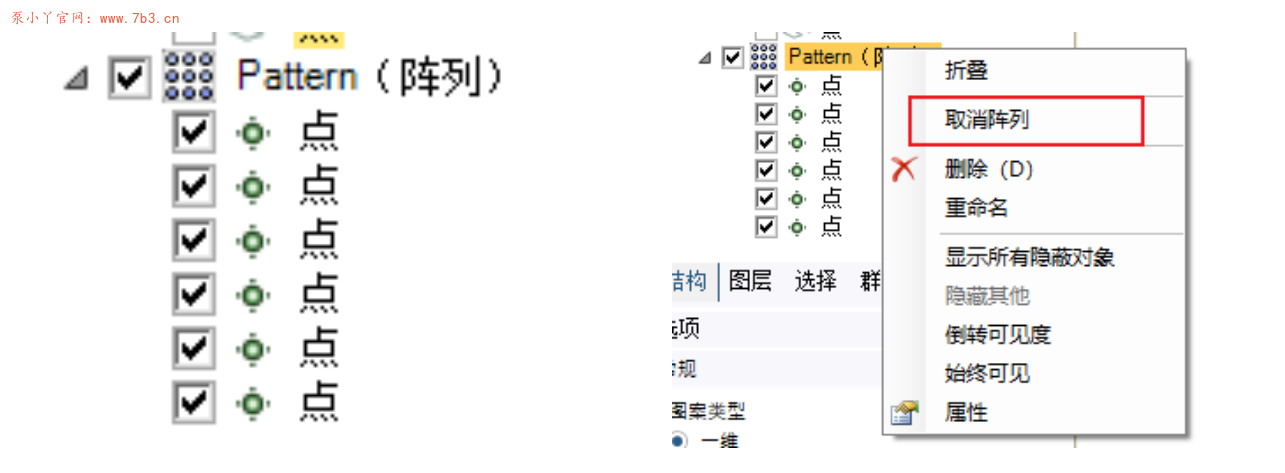
左图:结构树的阵列示意图 右图:取消阵列
图2 点的阵列复制
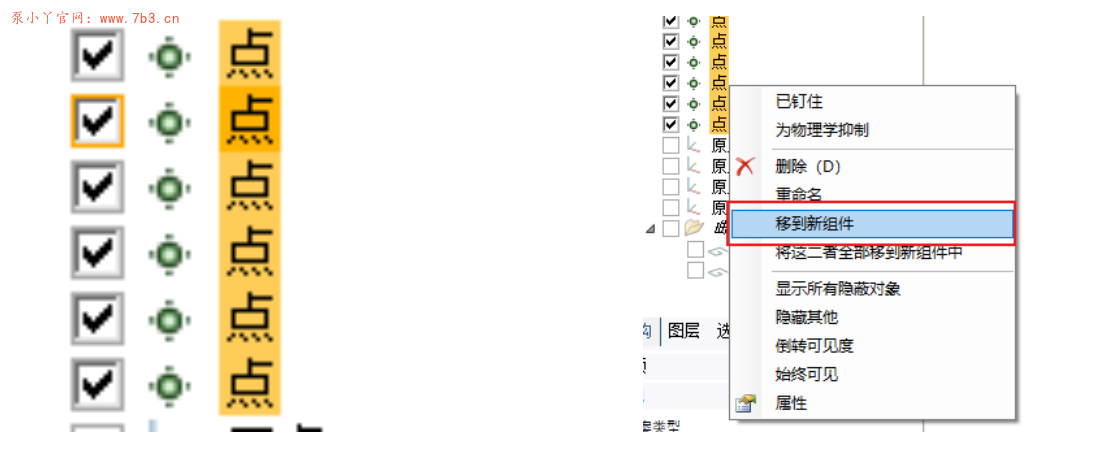

图4 监控点的组件
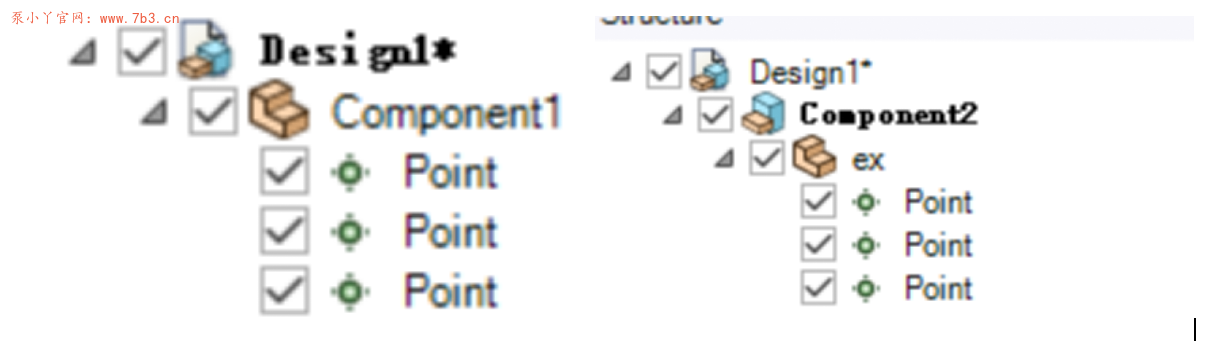
左图:正确位置 右图:错误位置,叠加在一个组件下面
2.2 Fluent监控点的创建
使用SpaceClaim的脚本(Script)功能,如图6所示,软件右侧将出现两个窗口,包括代码区和输出区,如图7所示。该功能语法基于Python。通过GitHub复制代码到脚本编辑区,用于Fluent的监控点设置脚本在输出去中。代码位置保存在GitHub中,同时附有逐行代码说明,方便大家修改和开发。(https://github.com/MemorXuxu/spaceClaimScriptsPython)。

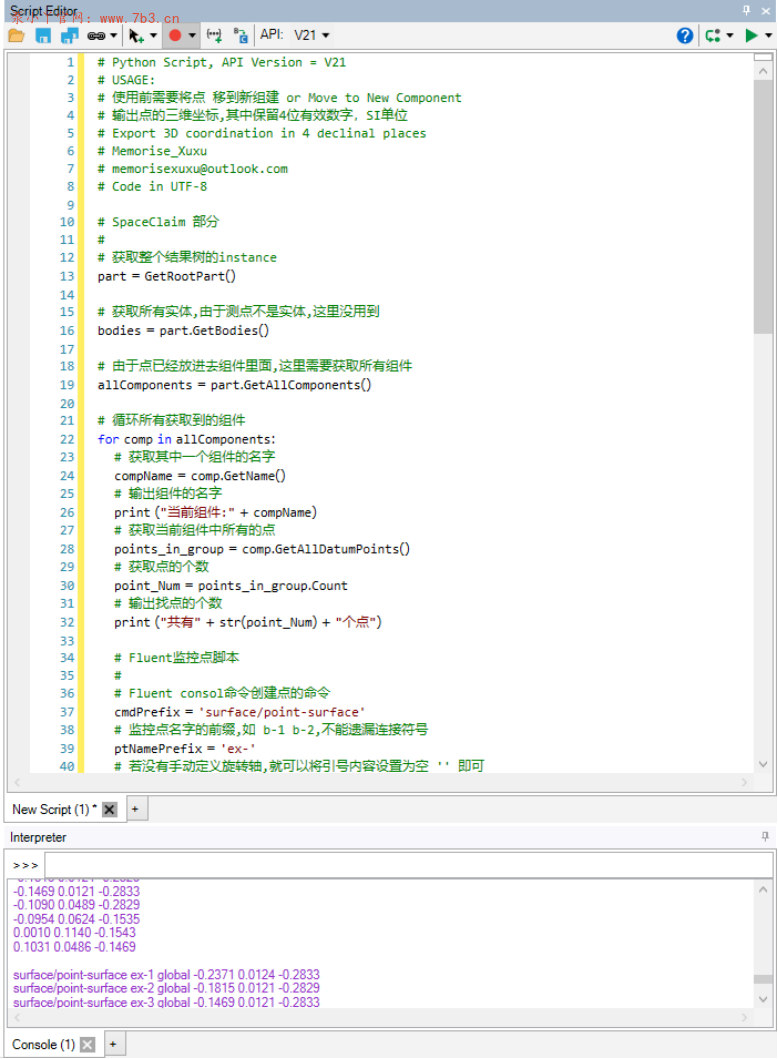
图7 脚本程序输出和输出
因此,此处只说明几处代码进行说明:
(a) ptNamePrefix:该参数为监测点的名字前缀,脚本提供三种命名方式,如图9所示。
(b)refAxis:对于移动监测点,如旋转叶轮,作者一般使用定义旋转轴的方法定义监测点(相关方法参考https://www.7b3.cn/3458.html),此时点的定义需要旋转轴名称,即该参数。
(c)脚本提供三种命名方式,如图9,第一种为固定坐标的定义方式,监控点名称前缀使用脚本定义的参数ptNamePrefix;第二种为旋转坐标的定义方式,监控点前缀与第一种一致;第三种为旋转坐标(若用于固定坐标,refAxis需要定义为空,即refAxis=’’)的定义方式,监控点命名前缀为点组件的名称,如图4所示,Fluent中监控点的命名格式为ex-1, ex-2, ex-3 ……
(d)脚本三维坐标精度为小数点后4位(代码中为{:.4f}),单位为米。
(e)脚本提供将Fluent代码保存功能,默认保存路径为用户根目录,即C:\User\[用户名]。
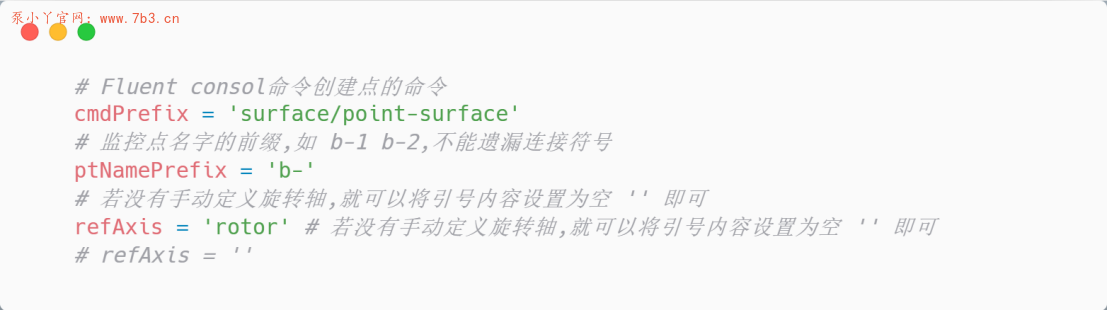
图8 脚本主要参数说明
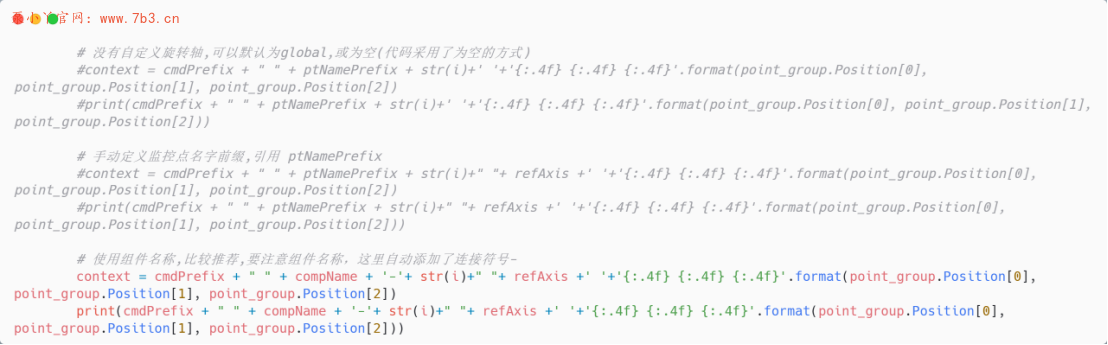
图9 监控点的三种命名方法
2.3 Fluent监控点创建
通过2.2创建得到脚本,结果如10所示。其中,surface…前缀内容为Fluent使用脚本。在Fluent中,command TUI中粘贴脚本内容(快捷键为Shift+Insert,不建议使用Ctrl+V),如图11所示,并检查TUI中有无创建失败的warning。监控点创建错误原因主要有:命名输入位置不在TUI的根路径上、点的位置超出计算域、监控点的单位不正确,需在Fluent中length设置为m。
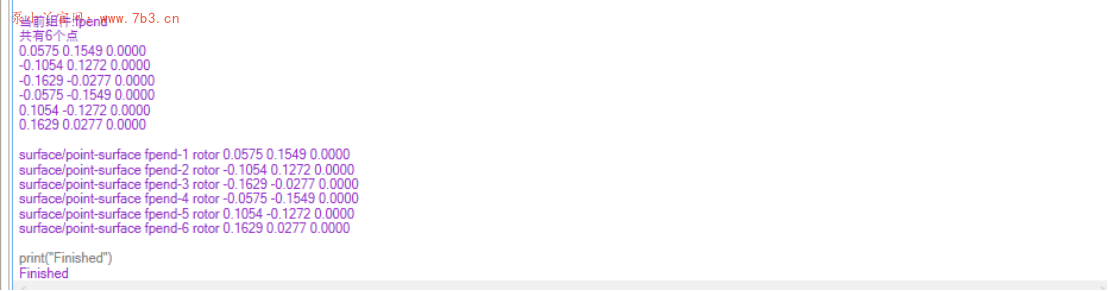
图10 Fluent监控点脚本示意图

图11 Fluent监控点创建
详细操作视频见文章顶部或下方。
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理,邮箱admin@7b3.cn。
人已充电
暂无讨论,说说你的看法吧


