|
You are here: Marine Templates and Tutorials > Marine Hull Template > Modelling Marine Vessel > Analysis Methods
|
Analysis Methods
This section contains information about the various analysis methods used in a marine simulation.
Resistance/ Powering Analysis
The motion of a ship through water requires energy to overcome the resistance offered by the water. The resistance in the case of a full-scale ship is generally measured from model tests. The total resistance(RT) in our marine simulations is the measure of the drag force that the vessel experiences.
The power thus required to tow the ship by overcoming this resistance is given by :

|
8.3 |
Dynamic Option
|
The dynamics motions of interest from the marine simulations are the trim of the vessel due to the pitch and the heave. The Dynamic Option specifies the dynamics that would be calculated from the simulation, as follows:
|
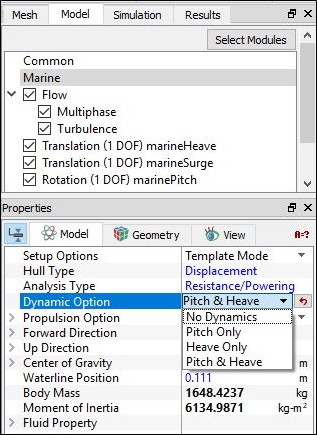
Figure 8.13 - Dynamic option in marine model |
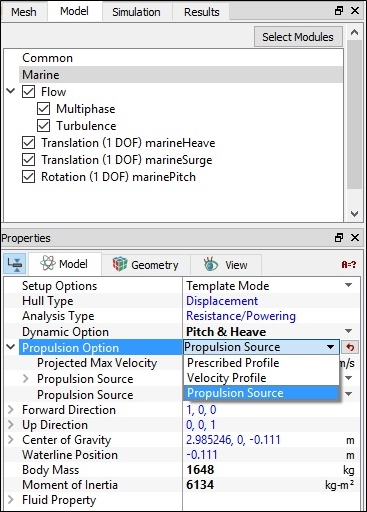
Propulsion Option
Marine propulsion is the generation of the thrust that moves the ship/ vessel forward overcoming the resistance offered by the fluid. In marine vehicles, an electric motor or an engine (diesel or gas turbine) drives the propeller through a system of shafts, bearings, reducers and other components. Since marine vessels are mostly sailing in open water at a constant speed, simulations are generally performed for steady propulsion conditions, and optimized for fuel efficiency.
The propulsion is represented by the addition of a body force term while solving the flow equations, which is represented by the term  , as shown in the momentum equation,
, as shown in the momentum equation,

|
|

|
|
The propulsion should therefore be represented by a suitable model. The propulsion can be described using any of the following methods.
|
|