


释放双眼,带上耳机,听听看~!
在昨天的导叶建模视频中可以看到,我们在得到模型坐标点(直观得到的是圆柱坐标系),这在CREO中是可以直接导入的,因为可以在导入前选择导入模型为圆柱坐标系,所以在CREO可以直接导入坐标。
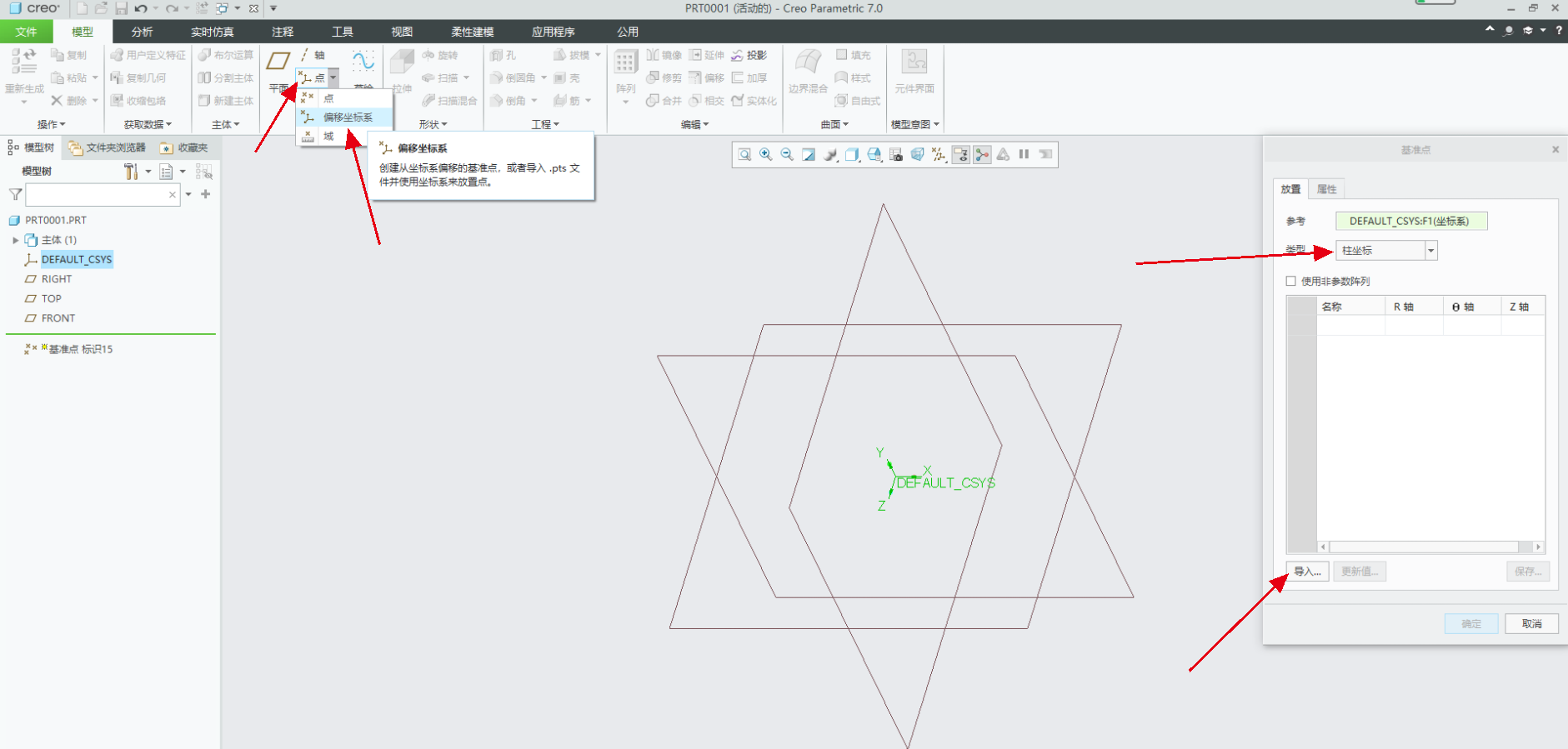
在UG中默认的坐标系为笛卡尔坐标系,所以如果直接导入坐标点你会发现他们缺少了一个角度参数,这是因为UG识别不了,怎么办呢,我们就要将坐标点转换为笛卡尔坐标
转换公式如下:
工作面:x=r*cosθ,y=r*sinθ,z=-z
背面:x=r*cosθ,y=r*sinθ,z=-(z+Dz)
上式中x、y、z分别代表笛卡尔坐标系下的坐标值
r、θ、z分别代表圆柱坐标系下的半径、角度和距离
根据上面的公式可以轻松完成坐标系的转换,但是要注意我们的角度θ通常为角度表示而非弧度,比如说角度是120°那我们在坐标变换的时候是要先转为弧度表示的。
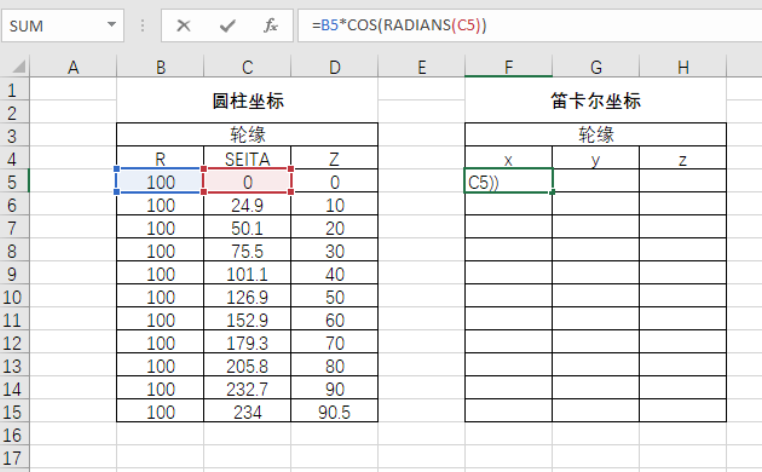
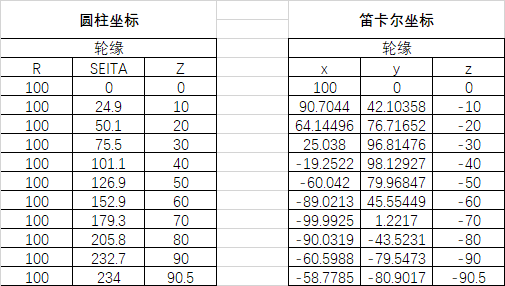
这种操作可以直接在EXCEL中轻松实现,下面以昨天的诱导轮钱缘数据点为例演示:
x=B5*COS(RADIANS(C5))
上式中为了将角度转为弧度,加了一个RADIANS函数!
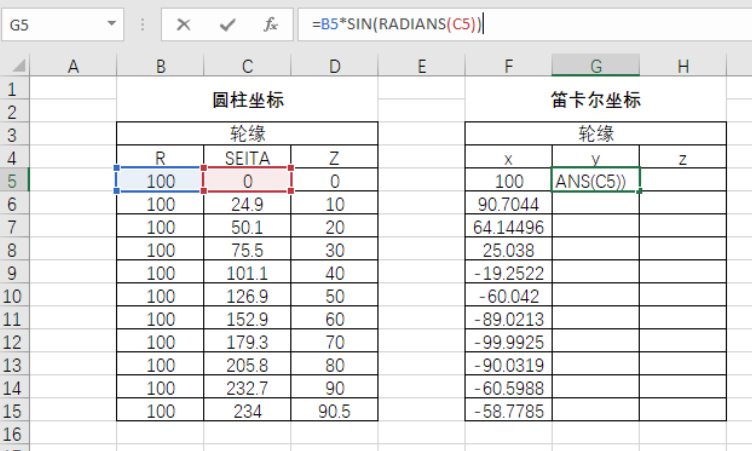
y=B5*SIN(RADIANS(C5))
上式中为了将角度转为弧度,加了一个RADIANS函数!
z=-z
最终得到如下坐标点:
将转换完成的笛卡尔坐标复制保存到txt文档中,然后就可以导入ug中了。
导入UG有2种方式,导入点文件或者直接用样条功能直接在导入点的同时创建样条曲线了。(具体操作可见下面GIF动画演示)


免责声明
泵小丫收集资源均来自网络
仅用于内部交流之用,如有需要请支持正版
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理,邮箱admin@7b3.cn。




学到了新知识