MRF是一种多参考系旋转模型,分为静参考系和动参考系。其中动参考系用于定义叶轮等旋转组件的运动情况,静参考系用于描述相对于旋转组件静止的模型的运动情况!所以MRF模型适用于至少有2个计算域且至少有一个运动的,比如带有蜗壳的离心泵、离心风机都是可以用这个模型的。
对于运动域与静止域连接的部分也就是耦合面,为了使数据能互通有无,需要通过“交界面”也就是“interface”面来实现,比如叶轮的出口面和蜗壳的进口面就是一组interface!interface面通常都是成对出现的,且使用interface并不要求这2个面上的节点完全对应(不要求共节点)!
MRF仅只用于稳态计算,和SRF模型一致。在CFX中这种计算模型被称为“冻结转子法”(Frozen rotor approach),具体解释可查看CFX官方帮助文档:

知识点1:交界面的位置如何确定?
就拿离心泵来讲,为了保证叶轮能够在蜗壳中顺利旋转肯定是要给叶轮和蜗壳中间留一定的间隙的,但是又要保证泵的性能,所以这个间隙的取值非常重要,根据泵型和泵尺寸的不同这个间隙也不一样,我们当且仅当这里肯定是要有个间隙的!对于流体域来讲这一部分间隙既可以给叶轮域又可以给蜗壳域,怎么划分?我们在Cfturbo中进行叶片泵水力设计的时候,最后一步是是否要对叶轮出口进行延伸,为什么要延伸呢?就是为了填补这个间隙的。如果不延伸,叶轮域是下图这样的:

MRF要求交界面最好是回转面,且大小应该一致,所以我们要对叶轮出口延伸一个完整的回转面出来,如下图所示:

还有一部分间隙的水体我们就可以加到蜗壳进口这个面上去了!
如果蜗壳宽度较大,而叶轮出口B2较小,可以在蜗壳上利用刻面功能创建一个与叶轮出口面相同大小的面作为interface,其余部分皆定义为壁面WALL。对于流动位置可能存在回流时,不能在此处选取交界面,会造成较大的误差!
知识点2:Fluent设置
interface面在建模的时候就要考虑到并定义好名称,方便Fluent中的设置!
相较于SRF模型,多了一个步骤那就是创建配对面(Interface),如下图所示:
选择一组互相配对的平面,点击下方Creat完成配对,如有多组配对面相同操作即可。

这里插播一个小知识点,创建配对面也分为共节点和非共节点这2种类型。所谓共节点就是我叶轮出口交界面上的网格节点与蜗壳进口交界面的网格节点一一对应,非共节点自然就是对不齐嘛!如下图示所示两种类型:
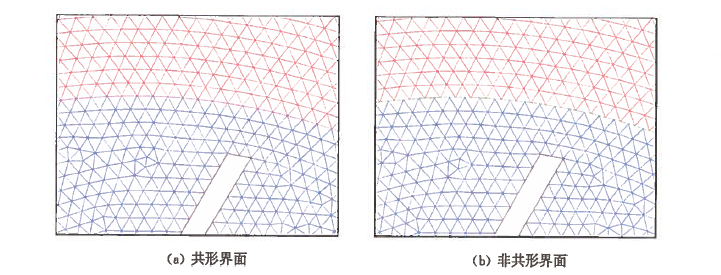
为什么会出现这2种情况呢?如果我们几何模型之间共享拓扑之后是可以画出共节点的网格的,如果单独对叶轮和蜗壳划分网格再进行装配,肯定就不是共节点了,即使这2个平面上给定相同大小的网格参数也无法做到节点一一对应的。
对于共节点网格,在mesh interface中完成配对就可以了,而非共节点还需要考虑这些选项。

创建完成后就其他边界及计算域的设置就和SRF一致了,具体设置可以看一下之前的文档: