|
You are here: Marine Templates and Tutorials > Marine Hull Template > Setting up the model > Defining Physics
|
Defining Physics
This section explains the setting up of the conditions and the physics for the marine simulation after creating the mesh for the computational domain.
Once the mesh for the domain is created using the Marine Template Mesher, the Marine Model is automatically added to the Model Panel. The Flow Model with the settings for Multiphase and Turbulence is also enabled. Under this model we specify the settings for the flow and the degrees of freedom -Translation & Rotation. The physics and conditions are specified in the Marine model as follows.
|
Most of the initialization is done at the Marine Template Mesher. Any change to the following settings can be made only at the Marine Template Mesher.
The following physics is defined as part of the Marine Model:
|
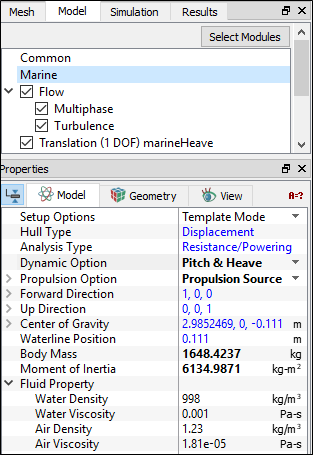
Figure 8.22 - Physics definition |
Defining Degrees of Freedom
The ship motions added to the model through the Dynamic Option and the Propulsion Option are defined with their respective settings. They are classified as Translation (1 DOF) and Rotation (1 DOF).
Defining Translation DOFThe following section contains information about the physics related to the translational motion of the vessel. The
|
Figure 8.23 - Translational DOF definition |
Defining Rotation DOFThe following section contains information about the physics related to the rotational motion of the vessel.
|

Figure 8.24 - Rotational DOF definition |